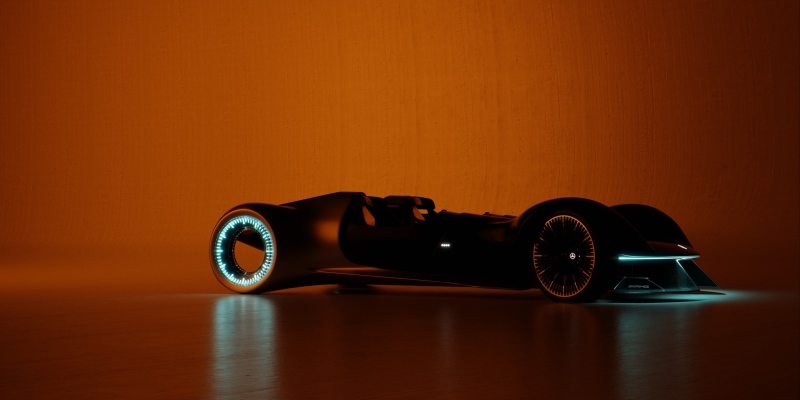
Treffler Máté Mercedes-Benz Vision EQ Flow című mestermunkája a MOME Formatervező művész MA szakán.
Treffler Máté a MOME Formatervező művész MA szakán készült Mercedes-Benz Vision EQ Flow elnevezésű mestermunkáját a vezetési élmény jelentőségének vizsgálatából kiindulva alkotta meg. A munkát a diplomázó leírásával közöljük.
Szakdolgozatomban arra vállalkoztam, hogy megvizsgáljam az jármű és ember kapcsolati viszonyait, a vezetési élményt, annak emberi aspektusait. A vizsgálatomhoz fejlődéspszichológiai és szemiotikai kutatásokat vettem alapul.
Minden élethelyzetben velünk vannak az érzelmeink. A környezetünk hat ránk, a tárgyaink szintén emóciókat váltanak ki. Az foglalkoztat, hogy tervezőként hogyan tudom a pragmatikát tudatosan használni a munkámban. A MOME-n kapott feladatok elvégzése során rögzült bennem, hogy minden tervet olyan mélységben kívánatos kidolgozni, amely figyelembe veszi a jelkészítő és a jelhasználó igényeit is. Ennek megfelelően a szakirodalom és a kutatási módszer kiválasztásánál is ezt a felvetést veszem alapul.
Érzelmeinknek nagy szerepe van a tervezés során. Formatervezőként főként az érdekel, hogy ezeket az érzelmeket hogyan tudom felelősségteljesen kezelni. A felelősségteljes tervezés magába foglalja a kitalálástól a modellezésen át a tárgy teljes metamorfózisát egészen a használatból visszavonásig. A jövő nagy kérdésének érzem az autóiparban, hogy a jóléti kényelemmel megjelenő új élmények mennyire szolgálják a fejlődést, melyben az autós egyre inkább passzív résztvevővé válik. Az egyértelmű választ a kutatások során nem találtam meg. Úgy vélem, erre egy nagy, átfogó megoldás még nem létezik a sokféle igény és gazdasági, környezeti változás miatt.
Az ember érzelmei a cselekvésben részvétellel aktiválódnak. Cselekvés és tapasztalás közben kötődik helyzetekhez, tárgyakhoz: biztonságban érzi magát annak használatakor, uralja és így töltődik fel egy tárgy jelentéssel, következésképpen válik valaminek a szimbólumává.
Évszázados gyakorlatot ír felül az elektromos meghajtás, sőt az önvezető járművek megjelenése, hiszen mennyire idegen tőlünk, hogy vezetés közben el kell engednünk a kormányt, nem nyomkodunk pedálokat, minden rajtunk kívül áll. Mennyire nehéz rábíznunk magunkat egy olyan technológiára, amely nem vesz figyelembe emóciókat, nem empatikus, csupán algoritmusok mentén működtetik a járművet.
Miközben erről gondolkoztam és szakdolgozatomat írtam, éppen féléves szakmai gyakorlatomat töltöttem a Mercedes-Benz sindelfingeni stúdiójának exterior design részlegén. Az ottani saját tervezési projektem során egy sportautót terveztem, mely a dolgozatomhoz kapcsolódó diplomamunkám is. A tervezés során figyelembe vettem mindazokat a kérdéseket és megállapításokat, amelyek a szakdolgozatom megírása közben felvetődtek.
Mercedes-Benz Vision EQ Flow
Mindezek mellett olyan témát szándékoztam választani, amely szakmailag és felhasználói szempontból egyaránt érint és érdekel. Mindig is nagyon szerettem a vezetést, mint aktív időtöltést. A járművekre leginkább érzelmi szinten tekintettem, a formaterv, a műszaki paraméterek és a vezetési élmény szempontjából is. Ebből a személyes motivációból döntöttem úgy, hogy diplomamunkám az önvezető autókkal, az azok által előállított élményekkel, kiváltott érzelmekkel, annak megformálásával foglalkozik.
Szakdolgozatom fontos alaptétele az élmény fogalmának definiálása. Az elméleti kutatásban Michael és Sheila R. Cole megfogalmazta, hogy „az élmény az érzékszerveink által felfogott jelek összessége”. Következésképpen számba vettem az összes érzékszervünket, és azt kutattam, hogy milyen ingerek, érzetek járulnak hozzá a vezetési élmény kialakulásához.
Ezt szándékoztam a diplomamunkámban tovább gondolni. Az első hipotézisem szerint azáltal, hogy a fizikai interakciót drasztikusan lecsökkentjük a járművel, illetve az önvezető technológia segítségével a jármű döntéshozatali mechanizmusában is sokkal kisebb szerepünk van, a jármű által adott élmény hosszú távon nem lesz olyan intenzív, mint amit a jelenlegi autók nyújtanak. Ezt az előzetes feltevést szerettem volna körbejárni, megkérdőjelezni.
A téma relevanciája
Az önvezető autó fogalma már régóta a köztudatban van, azonban a technológia mára elért arra a szintre, hogy a prémium gyártók modelljei már képesek lennének 4-es szintű önvezetésre, ezek azonban még jogilag nagymértékben korlátozva vannak. Az önvezető autó relevanciáját, térnyerését mi sem mutatná jobban, hogy a Mercedes-Benznél eltöltött féléves gyakornoki időm alatt a világon először a német közlekedési hatóság engedélyt adott a gyártó 3. szintű autonóm mobilitási rendszereinek kereskedelmi bevezetésére. Témám azonban nem az ezt lehetővé tevő konkrét technológiával foglalkozik, egy olyan lehetséges jövőképbe terveztem, ahol már minden autó önvezető. A téma fókusza tehát, az ilyen autók által kínált és nyújtott élmények voltak.
A kutatás
Jelenlegi élmények
Az előzőekben kifejtett gondolatot folytatva több szinten vizsgáltam a tendenciákat, főbb irányelveket: milyen típusú élményeket lehet kapni manapság a különféle autók formájában? Ez a járműnek a leendő termékpiacon való fiktív pozicionálását is teljesen meghatározza. Két tendenciát fedeztem fel.
Az első tendencia, hogy minél inkább prémium szegmensbe tartozik egy adott jármű, az általa kínált élmény különlegessége, intenzitása (bármelyik irányba) egyre jobban felértékelődik. Míg egy “népautónál” az emberek a racionalitást, a jó ár-érték arányt próbálják keresni, addig a prémium-, illetve luxus szegmensben sokkal emocionálisabb döntéshozatali aspektusok vannak. Ez első, élményt meghatározó tézisem, hogy a „luxus az élményt jelenti”. Ezt a gondolatmenetet a későbbiekben még folytatom. Diplomamunkámban, mivel Mercedes-t tervezek, a célcsoport és az ilyen típusú pozicionálás már adott, tehát az élménynek nem a jelenléte a fontos, hanem a milyensége. A második tendencia a jármű által kínált élmény típusa. Ezt leginkább két pólus között lehetne meghatározni.
Az első pólusnál a tervezők a klasszikus értelemben vett luxus élményét szeretnék megteremteni egy autóban. Ilyen jármű például az S-osztály, mely a szegmensben „benchmark” modellnek tekinthető. Ilyen esetben a hátsó utas a legfőbb személy az autóban, és mindent megtesznek, hogy ő a lehető legnagyobb nyugalomban és kényelemben utazzon. Ezt úgy érik el, hogy minden, a járművön kívüli környezetből érkező ingereket a lehető legminimálisabbra redukálják. Ilyenkor érvényes a luxus 3 alapelve: a csend, a kényelem és az erő. Ahhoz, hogy ezt az élményt létrehozzuk, ezeket a szempontokat a járműtervezés minden szakaszában figyelembe kell venni, az arányok kialakításánál, a beltér elrendezésénél, az anyagok megválasztásánál és így tovább. Ezt az élményt „Utazási Élménynek” definiáltam.
Ezzel szemben a második pólus ennek ellentéte. Ezt kínálja szinte minden egyes sportautó. A cél ilyen esetekben: legyen minél intenzívebb vezetési élmény. Ilyenkor az elsődleges személy a vezető maga, és az autó minden egyes paraméterét úgy tervezik meg, hogy ő minél több ingert kapjon az autó és a környezete felől. Nem a kényelem és a csend a legfontosabb szempont, pont ellenkezőleg. A Mercedes-nek ilyen modellje pl. az AMG GT, illetve az újonnan bemutatott SL is. Ezt az élményt mind a designerek, mind a mérnökök a saját eszközeikkel és lehetőségeikkel formálják, állítják elő. Az autó felépítése (idegen szóval package-e), arányai, a beltérben az üléspozíció, az ergonómia, a felhasznált anyagok teljesen eltérőek a másik pólushoz képest. Ezt a jármű technikai paraméterei, tulajdonságai is megerősítik. Keményebb futómű, mely nem olyan komfortos, azonban sokkal jobb menetdinamikát ad, direktebb a kormányzás, az ülések sokkal jobban tartanak, nem fotel-szerűek.
Önvezető jövőkép
Az előbbi élménytípusokra mind elmondható, hogy egy több, mint százéves történettel rendelkező autóiparban gyakorlatilag mindkét pólus jelen van. Azonban az önvezető technológia gyökeresen megváltoztatja ezeket az élményeket, azok viszonyát. A hagyományos luxus élményét ez a technológiai forradalom nem érinti olyan számottevően, ugyanis a hátul ülő embernek eddig sem kellett semmiféle vezetéssel bajlódnia, ebből következtetek arra, hogy az önvezető autókban az „utazási élmény” szinte a jelenleg tapasztalt formájában fog továbbmenni.
Annál inkább megváltozik a vezetési élmény, mely gyakorlatilag az utakon meg fog szűnni, ugyanis a vezetés, mint cselekvés, amelyből az élmény magja kiindul, lényegét veszti. Ennek a pólusnak kerestem az önvezető jövőképét. Hogyan lehet egy olyan ingerrendszert kialakítani, amely intenzitásában, legfőbb hangulatában ugyanazt az élményt adja az autóban utazóknak, mintha ők vezetnének? Ehhez hogyan lehet döntéshozatali pozícióhoz hasonló helyzetbe kerülni a járműben? Erre kerestem a választ.
Tervezés
Alapötlet
A tervezést az érzékszervek összegzésével, egymással való viszonyuk elemzésével kezdtem. Megvizsgáltam, hogy melyek azok az ingerek, amelyek meg fognak szűnni, vagy drasztikusan lecsökkennek, és hogyan lehetne pótolni, helyettesíteni azokat. A hagyományos és önvezető autók közötti legnagyobb különbséget a tapintásnak, látásnak, térérzékelésnek, egyensúlyérzékelésnek, mint élettani, pszichológiai ingernek terén tapasztaltam.
Annak érdekében, hogy a különböző interakciós felületek megszűnését pótoljam, egy olyan jármű koncepciót szerettem volna létrehozni, melyben ezt a hiányt a jármű plusz kiegészítő mozgással helyettesíti, így az érzékelés, észlelés, inger, mint pszichológiai folyamat nem is olyan minőségben, de intenzitását tekintve ugyanolyan szintű lesz. Ehhez más járműtípusokból merítettem inspirációt, mint például a motorok vagy a hullámvasutak.
Szakdolgozatomban a további mozgáshoz kapcsolódó fő ténymegállapítás Piaget szinaptogenetikus fejlődéspszichológiai modelljéből következik. Az elmélet lényege, hogy ahhoz, hogy az emberben igazán mély élmények keletkezzenek, ahhoz létszükséglet és nélkülözhetetlen az aktív részvétel. Ezt az elméletet fordítottam meg, mivel egy, az eddigieknél is intenzívebb fizikai és pszichológiai élményt adok az utasoknak. Ezáltal bennük az utazás alatt intenzívebb élmény és érzelem keletkezik.
Merre is mozogjon?
Miután a mozgásból adódó többlet inger ötletét kitaláltam, a következő feladat volt meghatározni, hogy a járműben milyen irányba legyen plusz elmozdulás. Összesen hat helyzetváltoztatási lehetőséget vettem számba, a Descartes-féle koordinátarendszer mentén minden tengely (X-Y-Z) mentén elmozdulni, és forogni. Többféle korai változatom volt, melyben több-kevesebb tengely menti mozgást lehetett volna kivitelezni. Azonban nem szerettem volna túlságosan sokféle irányú elmozdulással kiegészíteni a járművet, mert azáltal az autózástól, az ott élőben átélt ingerektől vette volna el a figyelmet. Végül egy, a hosszanti tengely mentén történő mozgást választottam ki, mivel ez az a forgás, amit már az emberek a legjobban ismernek, az utasok ösztönösen, a centrifugális erő hatása ellen, az egyensúlyozó szervük által utasítva „bedőlnek” a kanyarban az ülésben is.

Végleges koncepció
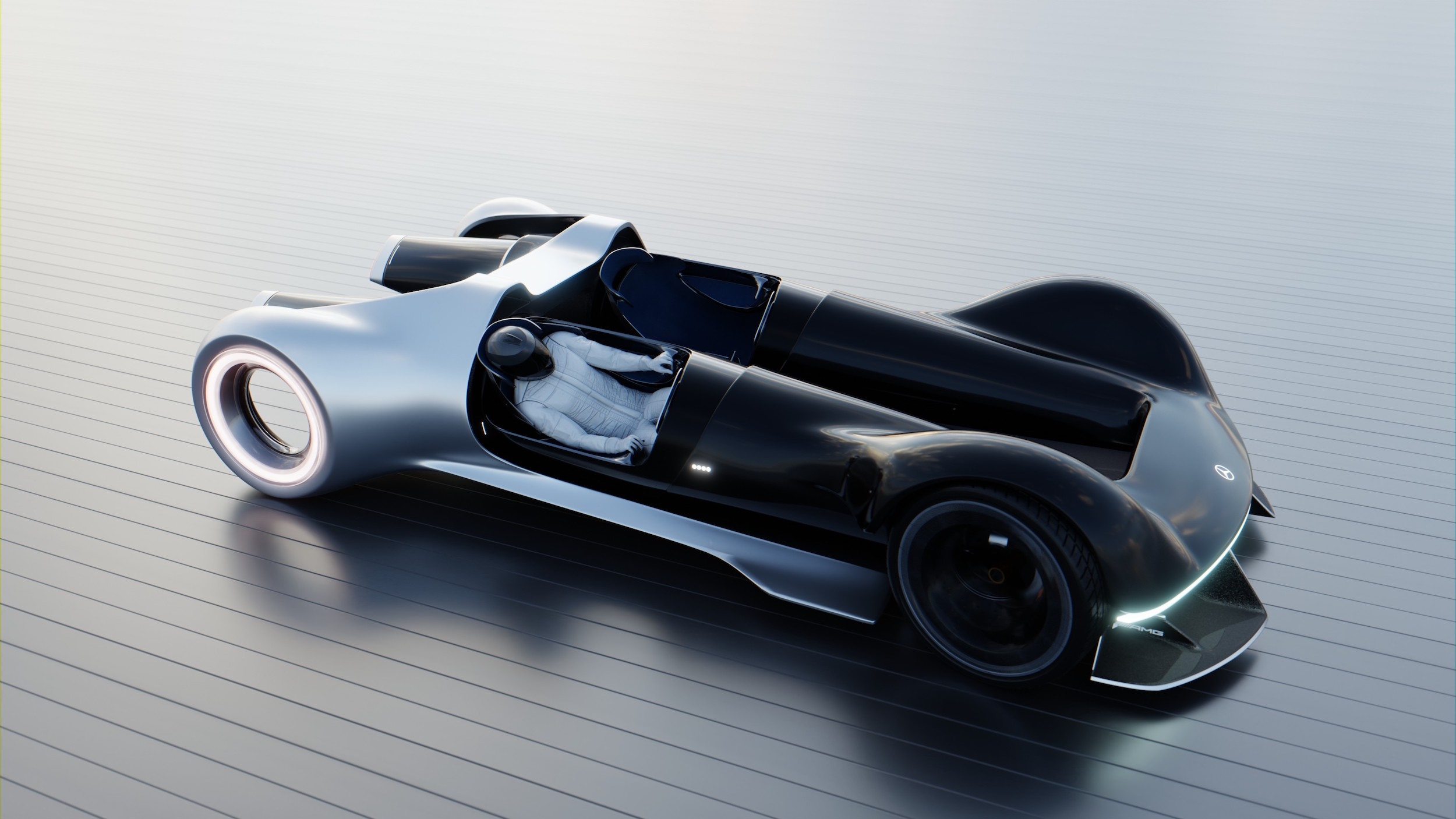
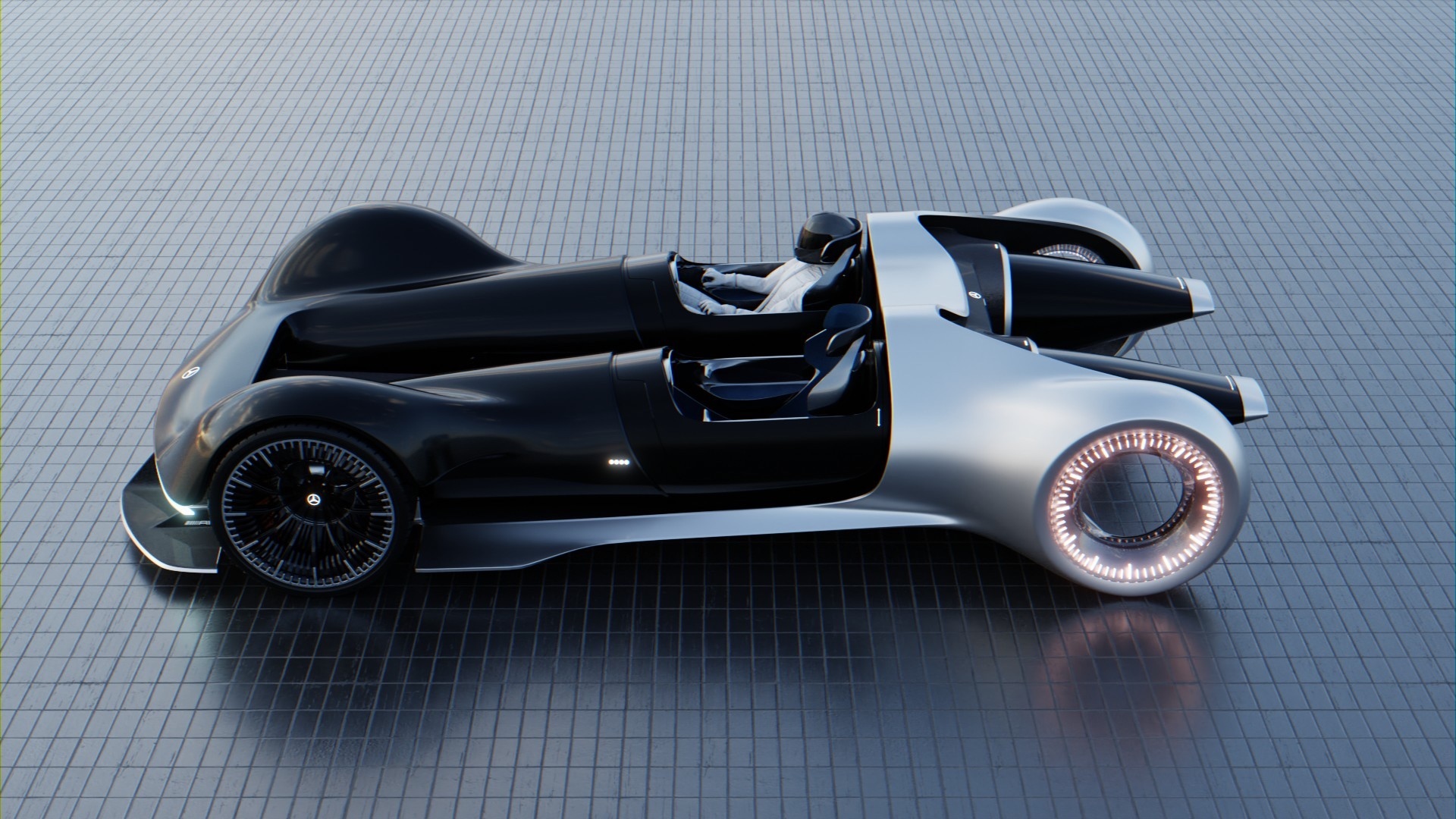
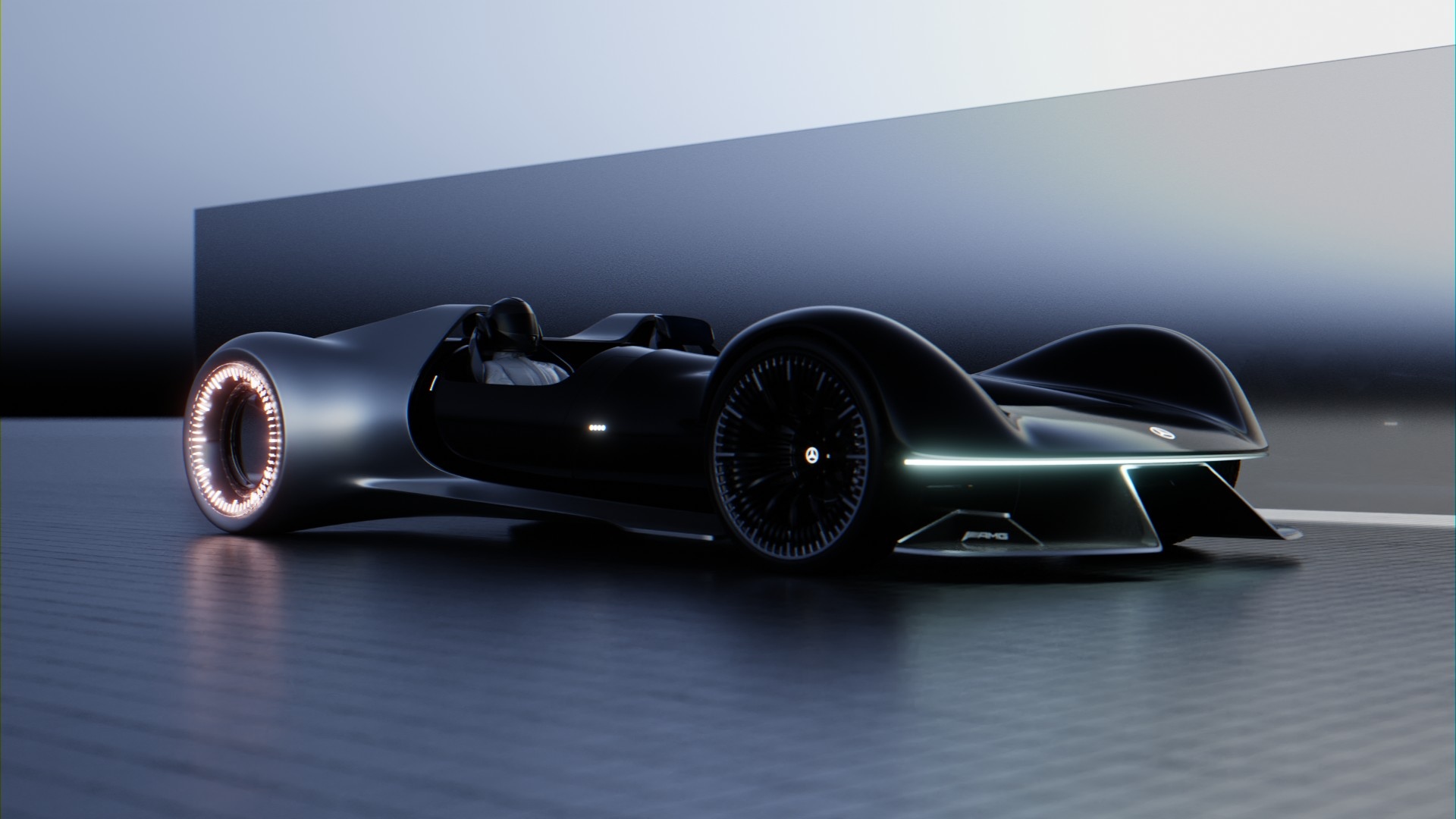
A végleges forgásirány kiválasztása után meghatároztam a jármű „package-dzsét”. Kategóriát tekintve olyan típust szerettem volna tervezni, melyben az utasokat a legtöbb inger éri, legyen az biológiai, fizikai, hangbeli vagy vizuális. Ennek következtében döntöttem úgy, hogy a jármű speedster típusú lesz. A speedster egy tető és szélvédő nélküli kétüléses sportautó. Mivel semmi nem védi meg az utasokat a különböző hatásoktól, ezért ennél a kategóriánál keletkezik a legintenzívebb ingerrendszer. A speedster a Mercedes-nek sem új, több, mint 100 éves történelme során több ilyen járművet is terveztek, legutoljára a 2009-ben bemutatott SLR Stirling Moss volt, ami a gyártó legritkább (75 darab készült belőle) és legértékesebb modelljei közé sorolható viszonylag fiatal kora ellenére. Külön érdekesség volt, hogy a cégnél töltött gyakornoksági időm alatt azokkal a tervezőkkel dolgozhattam együtt, akik részt vettek annak az autónak a megtervezésében.
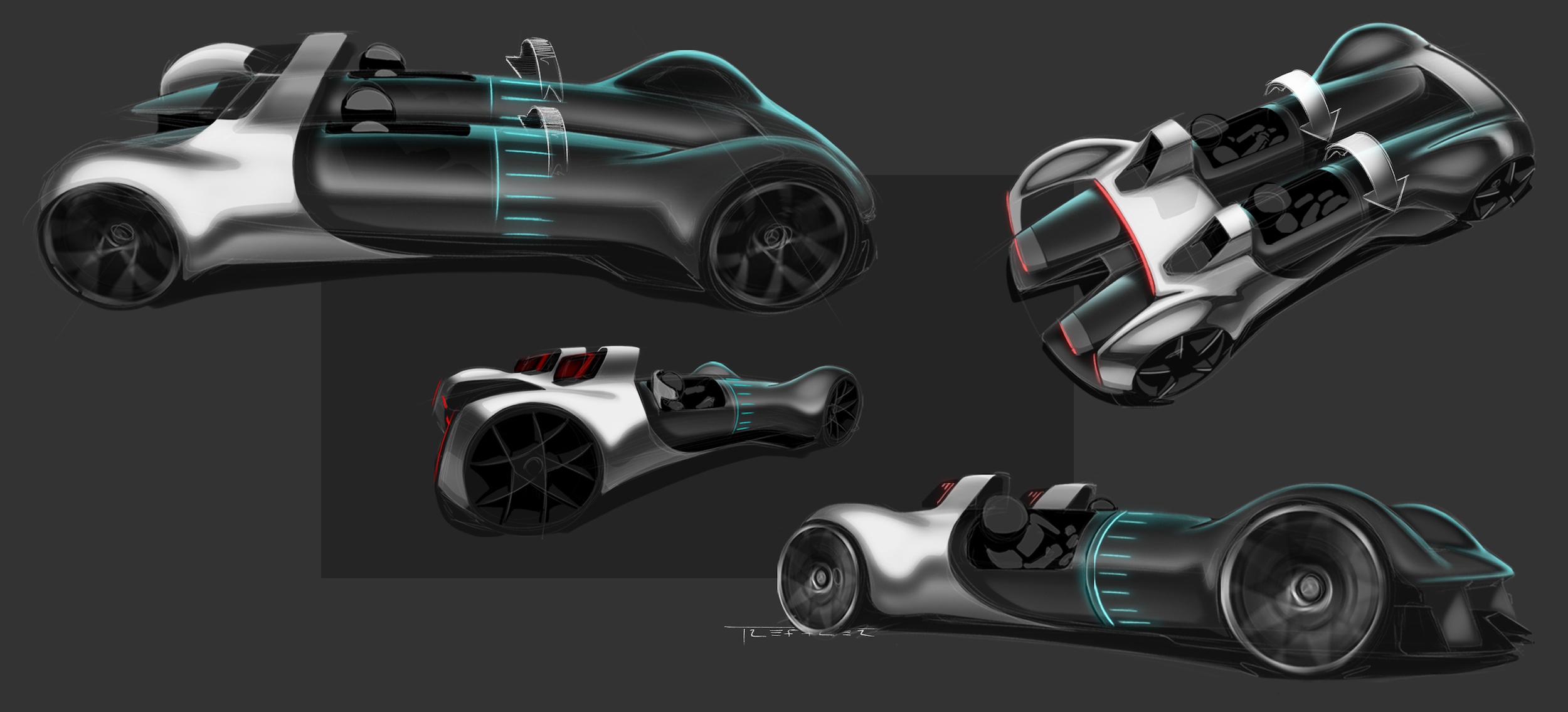
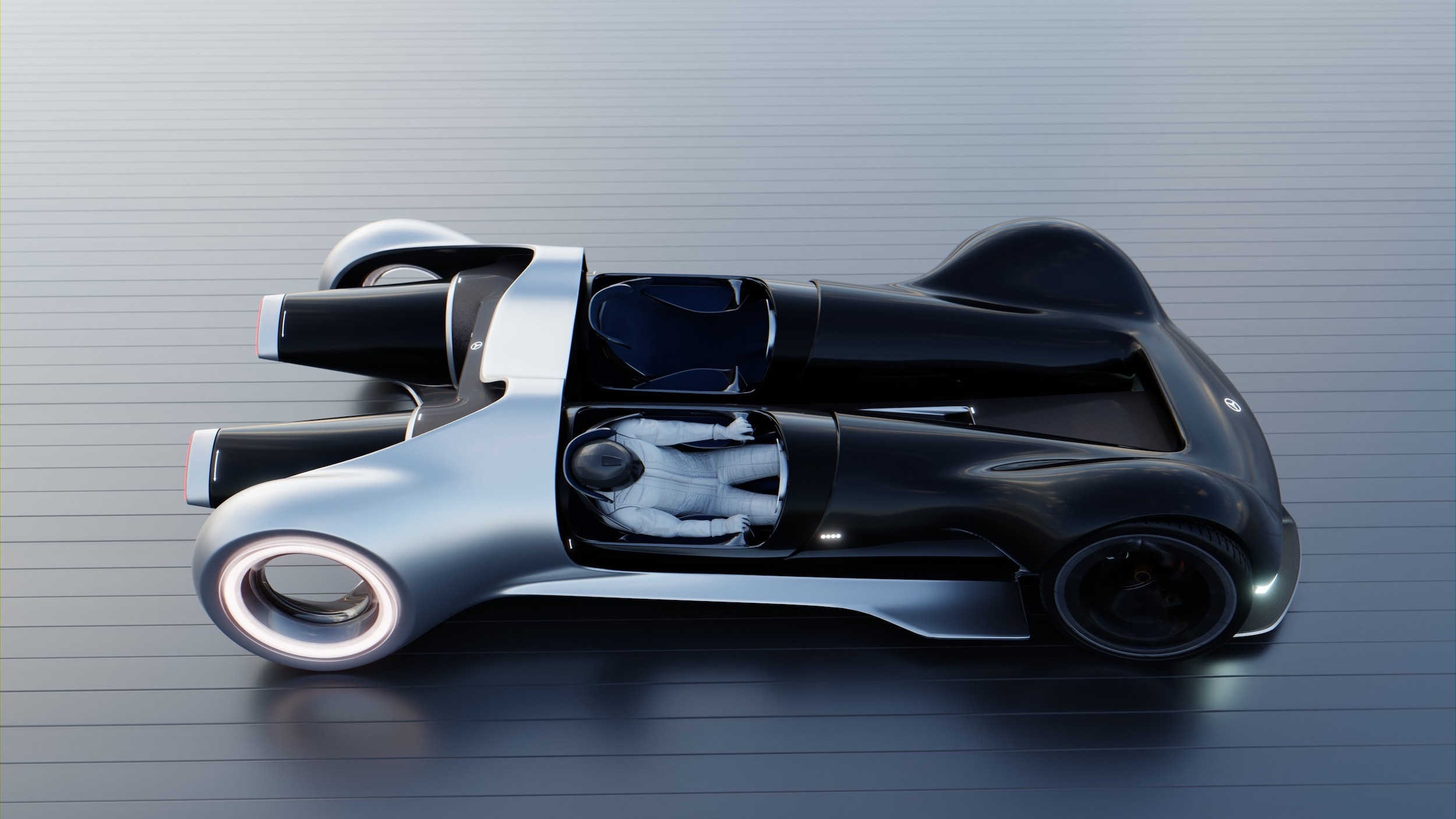
A jármű kiegészítő forgásából kezdtem el felépíteni a teljes koncepciót. Elsőként megnéztem, hogy hogyan lehetne az utasokat ilyen módon megforgatni, együtt, vagy külön. Végül a külön forgó jármű mellett döntöttem, hiszen az elforgás mértékét nagyban befolyásolja, hogy mekkora kapszula forog benne. Az így kialakult jármű egy „dupla single-seater speedster”. Mivel gyakornoki időmben a külső formatervező részlegen dolgoztam, a „styling” fázist a jármű exteriőrjével kezdtem szeptemberben, mely egészen februárig tartott, majd onnantól a belső formatervvel, illetve a vizualizációval foglalkoztam.

Exterior
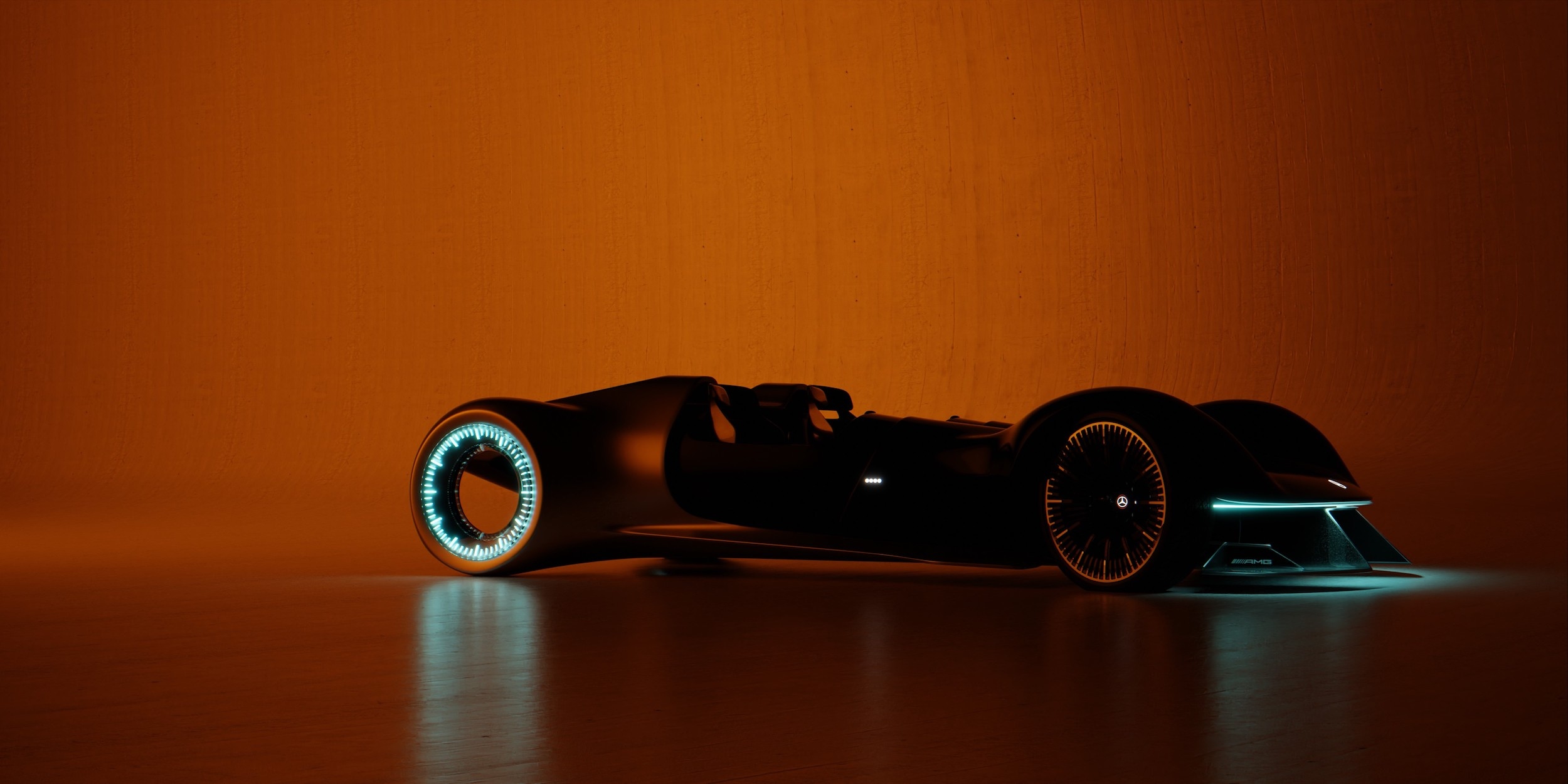
A külső formatervet az autótípus meghatározása után kezdtem el alakítani. Több formai variáción keresztül kísérleteztem, hogy hogyan lehetne a járműben úgy elhelyezni a két utast, hogy a két különálló kapszula a forgás hatására egyrészt ne ütközzön, másrészt egy különálló egységet alkosson a jármű többi részétől. A forgás bemutatását a formaképzésnél úgy értem el, hogy a kapszulákat teljesen körszimmetrikusra alakítottam. Ennek következtében egyrészt álló helyzetben a jármű azt kommunikálja, hogy itt valamilyen mozgás történik, másrészt a forgatás alatt így a jármű minden egyes állapotában a kapszula teljesen illeszkedik a jármű többi részéhez. A végleges formaterv három nagyobb egységből épül fel, a kapszulákból, illetve az ezeket körbefoglaló orr- és alsó részből.
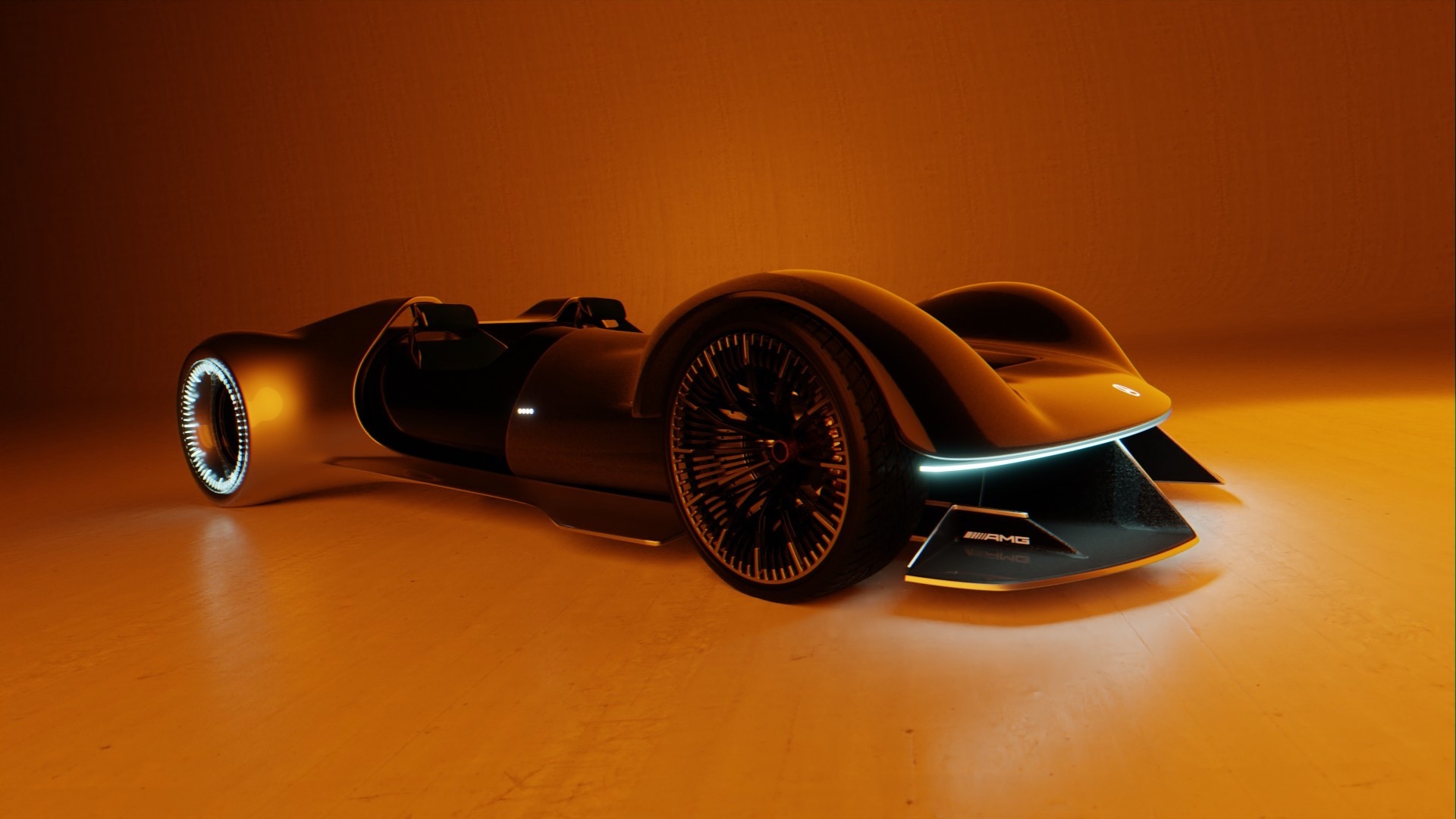
Az orr rész kialakításában fontos szempont volt, hogy a két hengeres testet, illetve a kerékjárati íveket egy komplex, mégis esztétikus formába integráljam. A hosszabb formaképzés során ebben az egységben adtam meg a jármű legfontosabb formakarakerét, hangulatát. A kerékjárati ív kihangsúlyozásával, az lámpatesttel, ami az orr teljes széltében világít, kiegészülve az alsó légterelőkkel mind a jármű sportos, izmos, agresszív karakterét kívánják erősíteni. Az első kerékjárati ívet mindkét irányban, a jármű vizuális értelemben vett tömegének csökkentése érdekében, alulról kivágtam, így az utasok láthatják a kerék forgását. Az orr rész és a kapszulák találkozásakor egy grafikai elemmel jelzi a jármű, hogy milyen állapotban van.

  |

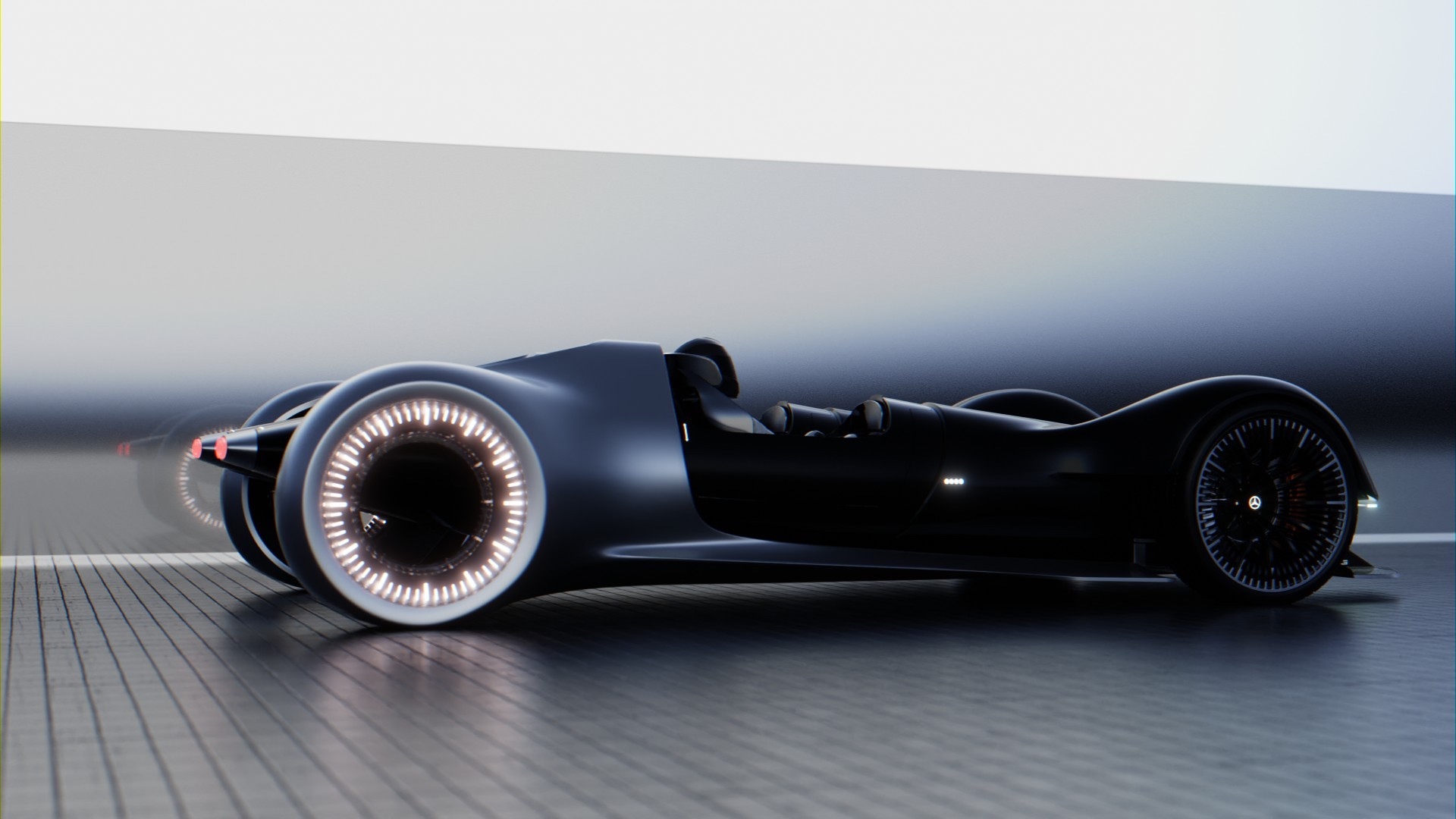
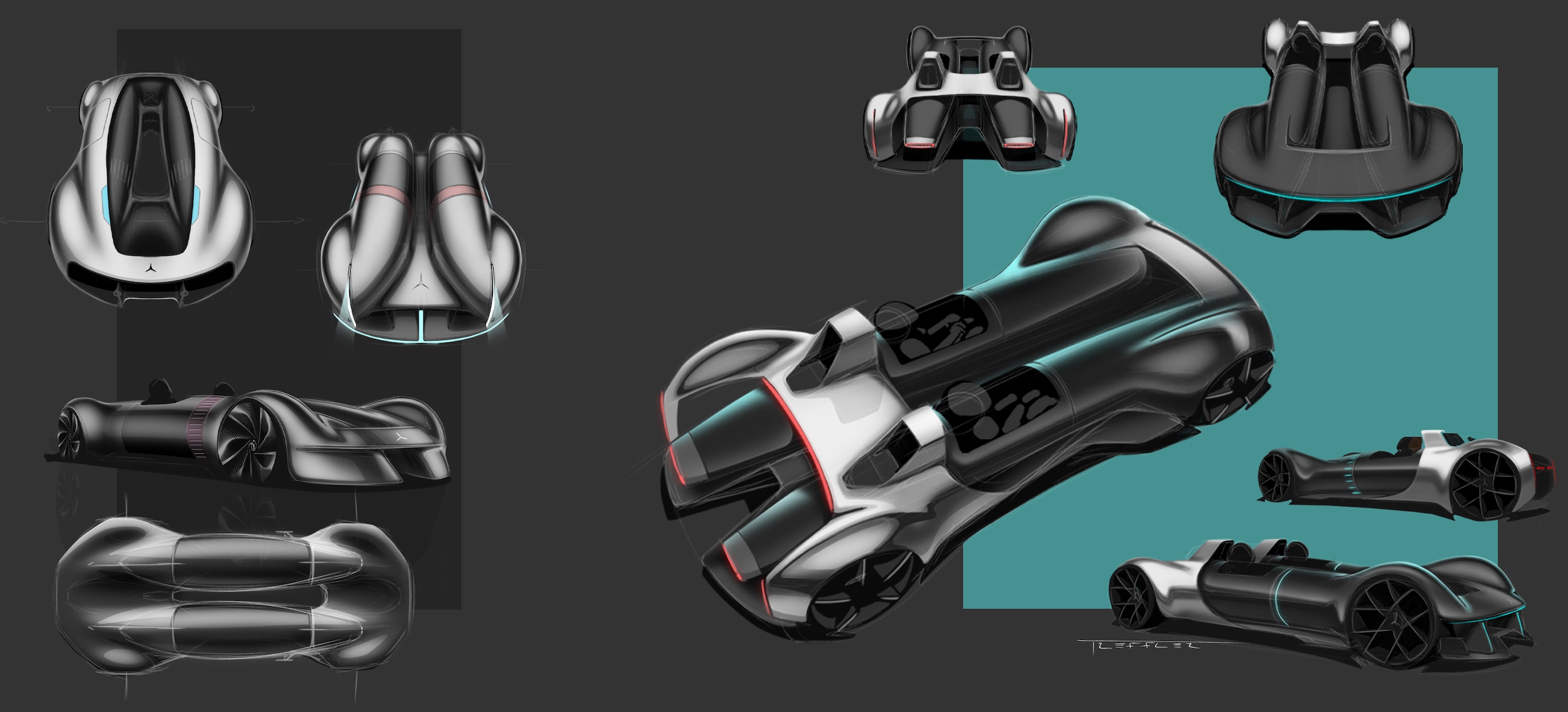
A jármű formailag legösszetettebb része a hátsó keret, ami a padlólemezt, a kapszula hátsó támasztását, a hátsó kerekeket és a fejtámlát foglalja magába. Ennél az elemnél a jármű dinamikusságát szerettem volna kihangsúlyozni. Ezt úgy értem el, hogy a jármű hátsó kerekei mögött nem hagytam semekkora túlnyúlást, pusztán a fejtámaszhoz kapcsolódik a kerékjárati ív. A hátsó kerekek teljesen integrálva vannak a testbe, ezt kiemelve a kerekek közepénél a test teljesen üreges maradt. A két fejtámla alatt található az a gyűrű, ahol csatlakozik a test a kapszulával. A gyűrűktől egészen a jármű elejéig a jármű alját illetve a kapszulákat tartja egybe a padlólemez. A tervezés során cél volt, hogy formailag, szín- és anyaghasználatban minél nagyobb kontrasztot teremtsek a jármű különböző komponensei között. Jelen esetben ezt úgy értem el, hogy míg az orr rész és a kapszulák sötétre vannak fényezve, addig a hátsó keret megmaradt fényes fémként, mely helyenként szénszállal van ötvözve.
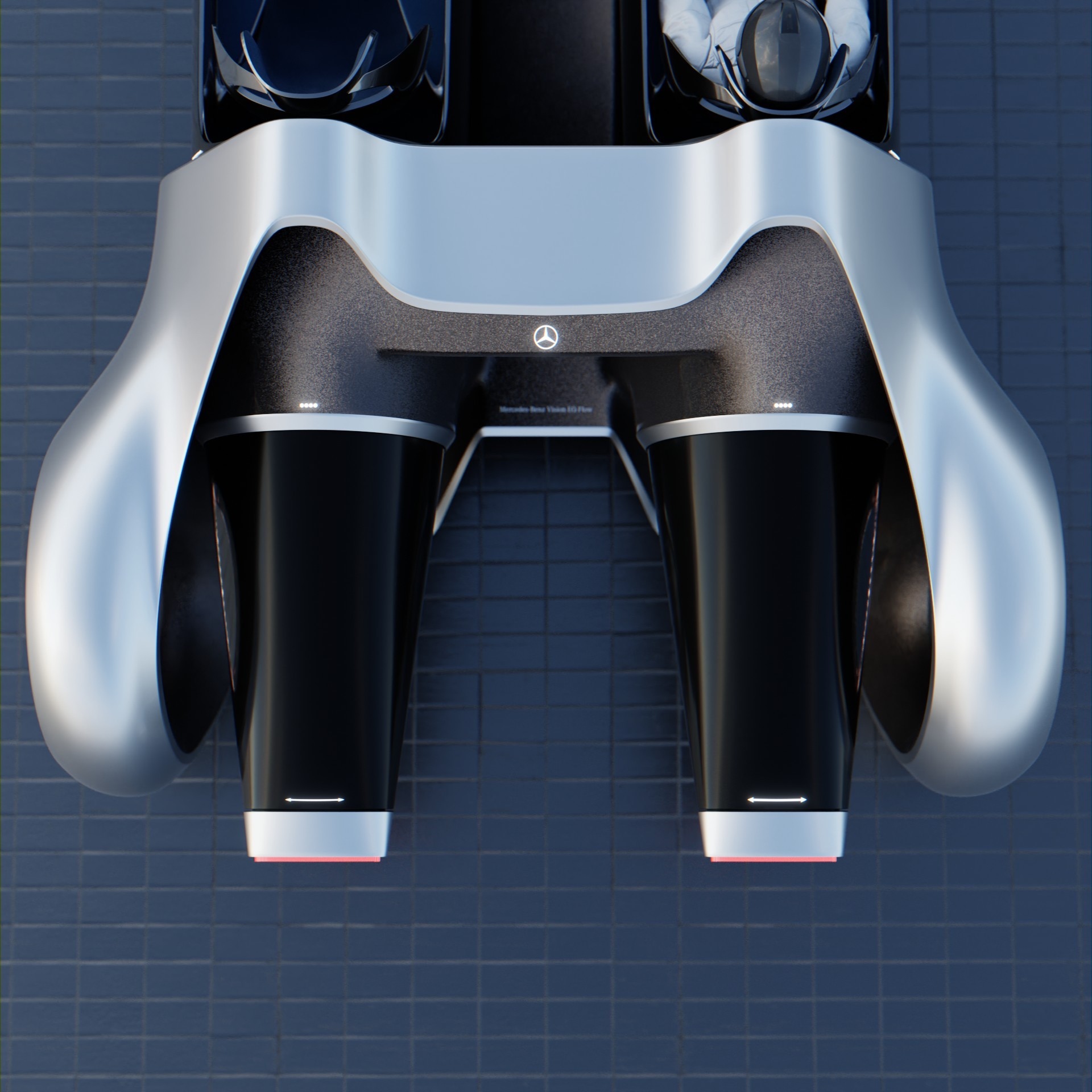
A két kapszula, amelyekről eddig is sokszor tettem már említést, 3 fokban előre vannak döntve, így adják meg azt a dinamikát, amit az előbb részletezett hátsó keretben is szerettem volna elérni. A kapszulákban nincsen sok hely, mivel a belső térnél a test átmérője 654 mm. A szűkösebb helykínálat cél is volt, hiszen olyan típusú járműről beszélünk, ahol az élményt nem a teljes kényelem adja, pont ellenkezőleg. A kapszulák egészen a jármű végét képezik, a hátsó kerekeken túlnyúlnak. Fontos szempont volt, hogy a koncepció kiegészítő forgását ne csak az utasok érezzék, hanem a jármű külseje is kommunikálja azt a környezete felé. Ezt úgy értem el, hogy a hátsó lámpák a kapszulák végén helyezkednek el, amelyek addigra már összelapultak. Így amikor a jármű forog, hátrafelé is jelzi a jármű, hogy az autóban oldalirányú forgás történik.
Interior
A jármű belterében is egy teljesen új rendszert hoztam létre. Mivel önvezető autóról beszélünk, minden eddig ismert utasok közötti viszonyrendszert át lehet írni. A másik fontos pont a járműben ülő emberek döntéshozatali szerepével van kapcsolatba. Hogyan tud kialakulni az élmény, ha csak passzív utasok vagyunk és nincsen interakció? (A kutatási részben korábban kitértem arra a pontra, hogy mikor alakul ki az emberben igazán erős élmény)

A fenti szempontok alapján tervezés elején az utasok közötti hierarchia tekintetében két fő irányt határoztam meg. Az első variációban a két utas között egy alá-felé rendeltségi viszony van, ami leképezi a jelenleg is ismert modellt. Egy, a döntéshozatalban dominánsabb személy, és egy passzív utas alkotja ezt. A tervezés legelején azonban célom volt, hogy mindkét utas számára egyformán ingergazdag környezetet hozzak létre, így ezt a rendszert viszonylag hamar elvetettem.
A másik modellben a két utas hierarchia szempontjából egyenlő, a járműben elfoglalt viszonyuk kiegyensúlyozott. Ez a variáció már kellő szabadságot adott ahhoz, hogy a járműben lévő interakciós felületeket teljesen újra tudjam értelmezni.
Döntéshozatal
Eredeti hipotézisem egyik fontos pontja volt, hogy hogyan lehet interakció nélkül erős ingert, következtetésképpen élményt kapni egy önvezető autótól. Ennek a megfejtésére a járművembe indirekt módon alakítottam ki a döntéshozatali szerepeket. A járműben ezentúl nem abban lesz az embernek szerepe, hogy merre megy, sokkal inkább az, hogy hogyan megy oda. Ebből a megállapításból terveztem tovább a belteret.
Megnéztem, hogy milyen paraméterek vannak a járműben, amit indirekt módon lehet irányítani. Összesen két ilyen tulajdonságra szűkítettem le a fókuszom. Az első a jármű valós, fizikai haladásának minősége, a másik az utazás közbeni elforgás mértéke, annak intenzitása. Az utasok ezeken keresztül tudják saját maguk kedve szerint állítani a jármű tulajdonságait, következésképpen aktív döntéshozatali szerepük van az utazás minőségét tekintve, így több impulzus éri őket. Ezt az interakciós lehetőséget a beltérben elsődlegesen ergonómiai szempontokból az utasok biztonsági kapaszkodójára helyeztem el (kékkel ábrázolva a rajzokon), így akármilyen pozícióban el tudják azt érni azokat.
A jármű iránti bizalom növelése érdekében a fentieket kiegészítve még egy feature-rel egészítettem ki a koncepciót, amelynek segítségével az utasok az adott pillanatban az autó irányát is meg tudják határozni. Ez lehetővé teszi, hogy a jelen értelemben vett vezetéshez legközelebb kerüljenek az emberek. Ezt a lehetőséget „Randomizer”-nek neveztem el, és a biztonsági fogódzkodó szarvak végén egy érintésérzékeny felület képében terveztem meg. Ha az ember végighúzza az adott irányba a hüvelykujját, akkor az autó a lehető első alkalommal abba az irányba fog továbbhaladni. Ezeknek az interakciós felületeknek a segítségével az utasok egy teljesen új, utazó és vezető közti szerepbe helyezkednek el.

Új élmény
Az előző gondolatmenet folytatásaként azáltal, hogy egy teljesen új szerepbe kerülnek a járműben az utasok, ebből adódik, hogy az így keletkezett élmény is olyan típusú lesz, ami valahogy a korábban említett „utazási élmény” és „vezetési élmény” közé esik. Több, mint utazási élmény, hiszen sokkal több döntéshozatali helyzeted van ebben az esetben, azonban kevesebb, mint vezetés, hiszen nem én döntöm el a jármű összes paraméterének az alakulását, változását. Ennek következtében kitaláltam egy elnevezést, egy új élményt, ami ezt a határterületet lefedi, ez a „Riding Experience”. Egyrészt azért is angolul határoztam meg, hiszem a Mercedes-es konzulenseimmel ezen a nyelven beszéltünk, másrészt lingvisztikai szempontból a „riding” szó az angolban egy sokkal tágabb kört foglal magába, nem csupán a lovagláshoz köthető (a motorbiciklit, a hullámvasutat, a lovat is ezzel az igével használják).
Az alapgondolat a BA szakdolgozatomból indult, ahol a Mazda MX-5 különböző design-filozófiáit elemeztem. Ott találkoztam a „Jinba Ittai” fogalmával, ami annyit jelent, hogy egység ló és lovas között. A lényegi különbség az előbb említett filozófia és az általam kreált élmény között, hogy míg a Mazda ezt a viszonyt, ezt a kötődést az érzelmi síkon, emocionális értelemben határozza meg, én a ló és lovas közti racionálisabb döntéshozatali kapcsolatot szeretném leképezni. Úgy értelmezem, hogy maga a ló (ami jelen esetben a jármű koncepciómat jelenti) egy önálló döntéshozatali rendszerrel ellátott fél, melyre mi, emberek, annak érdekében, hogy úgy haladjon, ahogyan azt mi szeretnénk, különböző finom behatásokat teszünk. Ez képezi le legjobban esetemben jármű és ember viszonyát. Így tud igazi élmény kialakulni egy önvezető autóban.
Végül a névválasztással kapcsolatban azért választottam a „Vision EQ Flow” nevet, hiszen a Mercedesnek egy bevett rendszere van a koncepció- illetve az elektromos járművek elnevezésében, ez ugye az első két szót determinálja. A harmadik szó a szakdolgozatomból indult, ahol foglalkoztam Csíkszentmihályi Mihály munkásságával is. A „flow” kifejezés jelen esetben több szinten is értelmet nyer. Egyrészt a hatás, amit el szerettem volna érni az utasokban, teljesen a Flow-elméletre alapszik. Szerettem volna, ha a önvezetés élményében elmélyednének, és a magyar pszichológus által megfogalmazott lelki állapotba kerülnének. Másrészt a „flow” magyar jelentése az áramlás, amit a jármű forgó kapszulájával szintúgy el kívántam érni. Ezeknek az aspektusoknak köszönhetően lett a diplomamunkám végső elnevezése: „Mercedes-Benz Vision EQ Flow”.

Témavezető: Húnfalvi András
Mestermunka konzulens: Robert Lesnik, Thomas Sälzle, Daniel Reist, Ruppert Dániel
Treffler Máté | Instagram
MOME | Web | Facebook | Instagram
Még több kép a galériában!





Ha tetszett a cikk, és szeretnél előfizetni magazinunkra, itt teheted meg.